L3Pilot vehicle owners collected data during piloting on public roads to evaluate ADF. The anonymized and aggregated data collected in the pilot trials is shared among partners for the evaluation process in a common data format (CDF).
Drone datasets and other data, e.g. from simulator tests will provide additional information; large-scale international surveys with 36,000 respondents assess attitudes towards L3 technologies and the effects on mobility.
Common Data Format
L3Pilot partners succeeded in developing a common data format (CDF) for both data collection and processing and implemented a consolidated database for processed data collection. The proposed CDF enables driving data and user questionnaire data sharing and promotes the development of tools for AD functions testing, verification and validation. Based on the L3Pilot-CDF comparison of performance indicators across pilot sites per driving scenarios is enabled. The format is considered a useful specification item for follow-up projects in the field and it is expected to contribute in the future AD testing harmonization in Europe.
Data analysts interested to use L3Pilot-CDF may visit the published code under
github.com/l3pilot/l3pilot-cdf
(→ external link).L3Pilot Open Data
The L3Pilot Open Data contains processed data collected during the Piloting of pre-series automated prototype vehicles on public European roads.
The dataset contains driving data in the form of performance indicators derived for all instances of certain driving scenarios such as Car Following or lane changes. Furthermore, it contains data from the questionnaires handed to both professional and ordinary driver piloting the vehicles.
All data is provided as comma separated tables. The supplementing document provides all necessary information for working with the dataset and mentions all documents, where additional information can be found.
You may access the L3Pilot Open Data here (→external link).
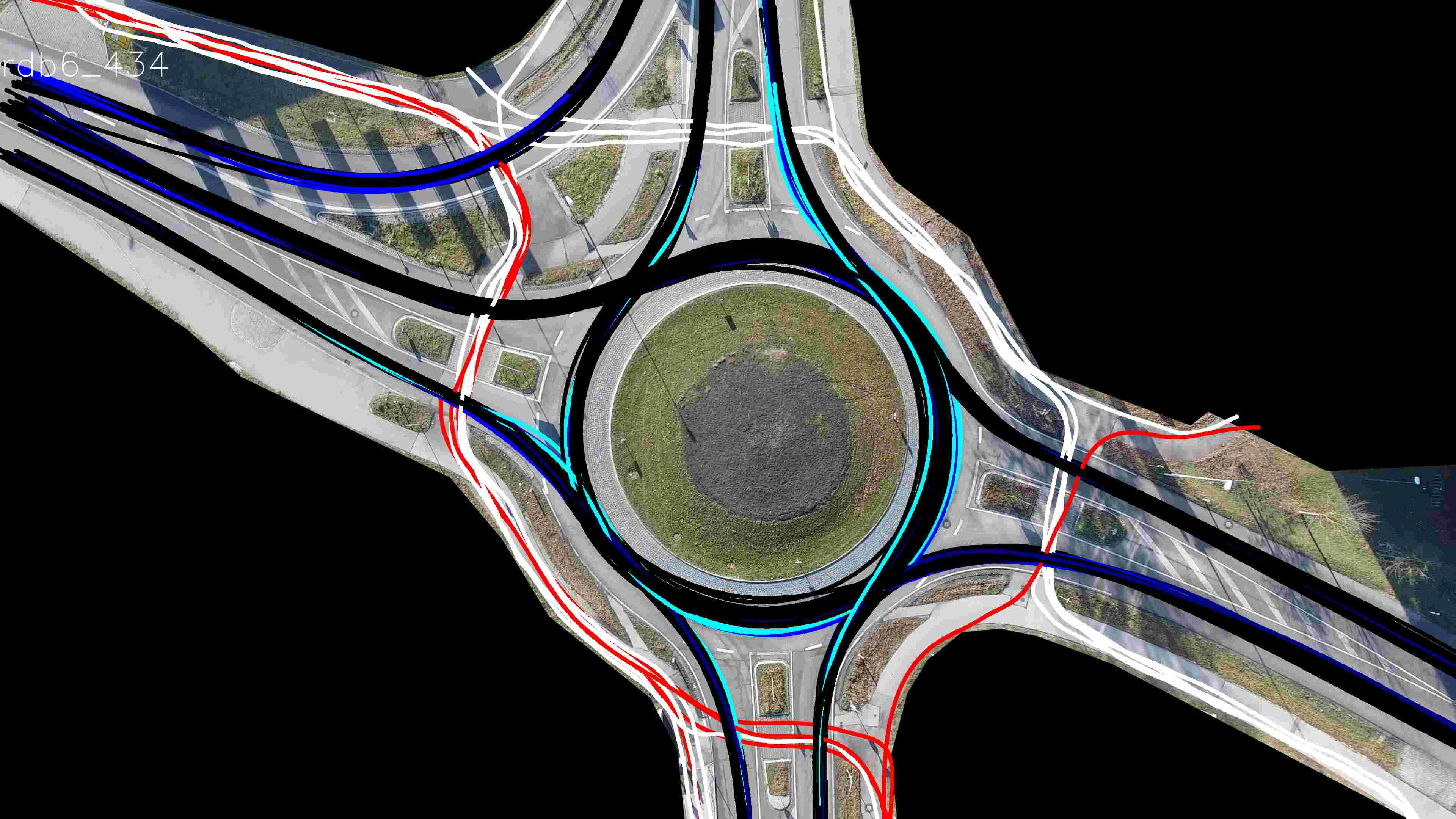
Drone Datasets
Drone datasets add valuable information to the data recorded during the pilot trials in the test vehicle and by user inquiries.
In conjunction with the in-vehicle data and the answers received from questionnaires it supports the evaluation of the data received.
The L3Pilot partners Volkswagen AG and fka GmbH (Linked 3rd Party) provide open drone datasets that have been created in the course of the L3Pilot project.

The OpenDD dataset published by Volkswagen Group Innovation is an extensive anonymized trajectory dataset, covering seven roundabouts in Wolfsburg and Ingolstadt, Germany. You may access the dataset here. |
The dataset offered by fka provides non-static reference measurements for the Vehicle under Test in public traffic in Aachen, Germany. The novel approach of flying along with the test vehicle allows to record valuable data supporting the technical evaluation. The drone data serves as a reference to the in-vehicle perception data and enhances the validity and reliability of data analysis. You may access the fka L3Pilot drone dataset here (→external link). More about fka´s drone datasets and their application can be learned here (→external link). |
L3Pilot Global User Acceptance Survey
The L3Pilot Global User Acceptance Survey investigated the acceptance of SAE Level 3 conditionally automated cars in 17 countries on five continents. Data was collected in two phases. The survey provides a comprehensive picture of user acceptance, attitudes, and expectations towards automated driving and the major challenges.
For further information about the survey, please consult L3Pilot deliverable D7.1 Annual quantitative survey about user acceptance towards ADAS and vehicle automation.
L3Pilot Open Dataset
This dataset contains the data from the first phase of the survey including wave one and two, conducted in 2019 and 2020.
The L3Pilot Global User Acceptance Survey open dataset has been published in the Zenodo repository. You may access the dataset here (→external link). |
L3Pilot Country Dashboards
Based on the first phase dataset, containing the data from the first two waves of data collection from the L3Pilot Global User Acceptance Survey, country dashboard were elaborated, providing a focused overview of relevant sample information and key variables from the survey.
These dashboards shed light on central aspects regarding the acceptance, attitudes, and expectations towards automated driving as well as the major challenges that need to be addressed before market introduction.
The country dashboards have been published in the Zenodo repository. You may access the country dashboards here (→external link). |
L3Pilot Global User Acceptance Survey Selected Results
These selected results are based on analyses of the first phase dataset, containing the data from the first two waves of data collection. We derived comprehensive insights of relevant sample information and key variables from the survey. The analyses shed light on central aspects regarding future market introduction scenarios.
Topics discussed are:
- Current usage of ADAS
- Acceptance of L3 cars
- Intention to use
- Technology and AD awareness
- Expectations towards L3 cars
- Secondary tasks
Please find the L3Pilot Global User Acceptance Survey Selected Results here.
DLR Open Data
As part of the Application Platform for Intelligent Mobility (AIM), the traffic situation of an intersection in Braunschweig (Germany) was recorded in order to better understand the behavior of road users. In L3pilot, the normal driving behavior at the intersection was analyzed. We focused on kinematic and interaction behaviour of a vehicle (turning left or right, going straight) with oncoming road users (VRU and motorised vehicles) and with lead vehicle. Altogether, 30 days of trajectory data of different months of 2018 and 2019 of the relevant scenarios were analyzed.
You may access the dataset here (→external link).